
Sensor Ultrasónico (Medidor de Distancia): Arduino e Industrial
El sensor ultrasónico funciona como el sonar de un murciélago: emite un sonido inaudible y mide el tiempo que tarda en rebotar (eco).
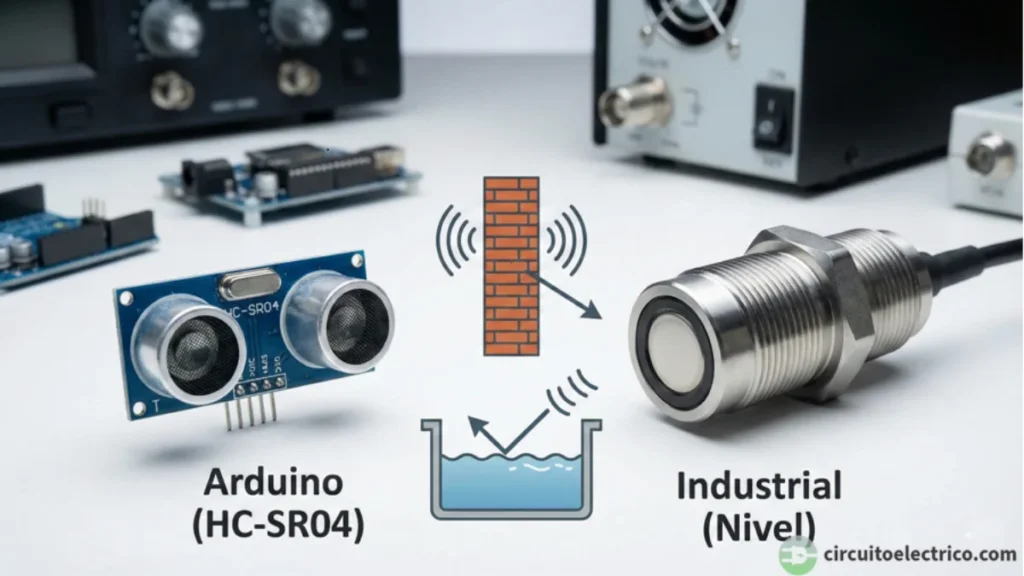
Esta tecnología permite medir distancias y niveles de líquidos sin contacto físico, siendo ideal tanto para robótica (Arduino HC-SR04) como para tanques industriales.
Este sensor se ha convertido en el componente fundamental para proyectos que requieren autonomía y seguridad, permitiendo desde que un pequeño robot esquive paredes hasta que un coche moderno nos ayude a aparcar sin colisionar.
La capacidad de estos sensores para detectar objetos y medir distancias en una amplia variedad de condiciones, así como su resistencia ambiental, los convierten en una opción ideal para aplicaciones exigentes.
El símbolo del sensor ultrasónico es el siguiente:
Contenidos
- Funcionamiento del Sensor Ultrasónico
- Salidas del Sensor Ultrasónico
- Características del Sensor Ultrasónico
- Módulo HC-SR04 (Arduino): Pines Trig y Echo
- Zona Muerta y Limitaciones (Espuma/Viento)
- Aplicaciones del Sensor Ultrasónico
- Comparación del Sensor Ultrasónico con Otras Tecnologías
- Preguntas Frecuentes sobre el Sensor Ultrasónico
Funcionamiento del Sensor Ultrasónico
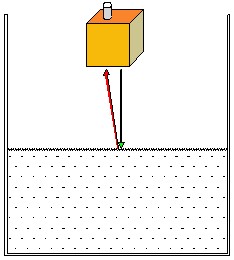
El funcionamiento de un sensor de ultrasonidos se basa en la ecolocalización, similar a la que utilizan los murciélagos. El sensor emite una onda ultrasónica, que se propaga por el medio (generalmente aire). Cuando esta onda encuentra un objeto, se refleja y regresa al sensor.
Midiendo el tiempo que tarda la onda en ir y volver, y conociendo la velocidad del sonido en el medio, se puede calcular la distancia al objeto. La fórmula fundamental es:
Distancia = (Velocidad del sonido × Tiempo de viaje) / 2
donde:
Velocidad del sonido: depende del medio de propagación (en aire es aproximadamente 343 m/s a 20°C y varía con la temperatura y la humedad).
Tiempo de viaje: es el tiempo transcurrido entre la emisión de la onda y la recepción del eco.
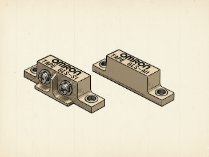
Un sensor de ultrasonidos típico consta de los siguientes componentes principales:
● Transductor ultrasónico: es el componente clave que realiza la conversión entre energía eléctrica y energía acústica (ondas ultrasónicas). Generalmente utiliza materiales piezoeléctricos que vibran al aplicarles una tensión eléctrica, generando la onda, y viceversa, generando una tensión eléctrica al recibir la onda reflejada. Está compuesto por:
– Circuito emisor: es el transmisor encargado de generar la señal eléctrica que excita al transductor para emitir la onda ultrasónica.
– Circuito receptor: amplifica y procesa la señal eléctrica proveniente del transductor al recibir el eco. Incluye filtros para eliminar el ruido y circuitos de detección de eco.
● Circuito de control: es el microcontrolador que controla la secuencia de emisión y recepción, mide el tiempo de viaje y calcula la distancia. También se encarga de la comunicación con otros dispositivos.
Salidas del Sensor Ultrasónico
La gran mayoría de los sensores de ultrasonidos que se encuentran en el mercado y que se utilizan en aplicaciones comunes (como robótica, medición de distancias cortas, detección de nivel, etc.) son sensores de reflexión directa que trabajan en modo difuso.
En este tipo de sensores, el emisor y el receptor están ubicados en el mismo dispositivo. La onda sonora parte del dispositivo y, tras chocar con el objeto a medir regresa.
Además, estos sensores ultrasónicos no suelen tener una configuración de salida única; las opciones disponibles dependen del modelo y del fabricante. A continuación, se detallan las opciones más comunes:
Salida a Transistor de los Sensores de Ultrasonidos
Se trata de salidas binarias que utilizan transistores para conmutar la señal. La diferencia principal entre NPN y PNP radica en cómo se conecta la carga al sensor.
En la salida a transistor el sensor proporciona una señal que dependerá de si se detecta un objeto dentro del rango especificado o de si no se detecta nada.
La salida NPN (sinking o sumidero de corriente) está en circuito abierto cuando el sensor no detecta el objeto y proporciona el valor de tierra (0V) cuando el sensor detecta el objeto. La salida PNP (sourcing o fuente de corriente) está en circuito abierto cuando el sensor no detecta el objeto y proporciona el valor de la fuente de alimentación positiva (Vcc) cuando el sensor detecta el objeto.
Las salidas a transistor son de alta velocidad de conmutación y bajo coste, integrándose fácilmente con electrónica digital. Su limitada capacidad de corriente imposibilita que puedan controlar directamente contactores. Se pueden utilizar para controlar relés más pequeños.
Salida a Relé de los Sensores de Ultrasonidos
Las salidas de relé electromagnético controlan cargas de mayor potencia. El sensor activa un relé electromagnético cuando se detecta el objeto. El relé actúa como un interruptor, abriendo o cerrando un circuito independiente.
Pueden disponer de 3 tipos de contactos:
● Contactos normalmente abiertos (NA): los contactos NA, en su estado de reposo, se encuentran abiertos, impidiendo la conexión eléctrica. Sin embargo, al activarse el relé, estos contactos se cierran, estableciendo una conexión que permite el flujo de corriente a través del circuito controlado.

● Contactos normalmente cerrados (NC): en condiciones normales, los contactos NC están cerrados, lo que significa que hay una conexión eléctrica. Al activarse el relé, los contactos NC se abren, interrumpiendo la conexión y deteniendo el paso de corriente a través del circuito.

● Contactos conmutados (NA/NC): al activarse el relé, los contactos NA se cierran, estableciendo una conexión eléctrica, mientras que los contactos NC se abren, interrumpiendo la corriente en otro circuito. Al desactivarse el relé, ocurre el proceso inverso y los contactos vuelven a su estado original.
Aunque las salidas a relé proporcionan aislamiento galvánico entre el circuito del sensor y el circuito de la carga y pueden controlar cargas de CA y CC, tienen baja velocidad de conmutación en comparación con los transistores, además de una vida útil limitada por el desgaste mecánico.
Salida Analógica (0-10V / 4-20mA) para Nivel
La mayoría de sensores ultrasónicos proporcionan una señal continua proporcional a la distancia medida. Los tipos más comunes son:
– Voltaje (0-10V, 1-5V, etc.): la tensión varía linealmente con la distancia.
– Corriente (4-20mA): la corriente varía linealmente con la distancia.
La salida analógica se conecta a una entrada analógica (con ADC o Convertidor Analógico a Digital) de un PLC, un microcontrolador o un sistema de adquisición de datos.
Es fundamental conocer la escala de la señal de salida para interpretar correctamente la lectura. Por ejemplo, 0-10V podría corresponder a 0-1 metro.
Al trabajar con sensores de salida analógica, es importante considerar que las señales de voltaje son más vulnerables al ruido eléctrico en comparación con las señales de corriente, lo que puede afectar la precisión de las mediciones.
Características del Sensor Ultrasónico
A continuación, se presentan los principales parámetros técnicos del sensor ultrasónico:
● Detección sin contacto: no requieren contacto físico con el objeto, evitando el desgaste y los daños.
● Frecuencia de operación: es la frecuencia de la onda ultrasónica emitida, típicamente entre 20 kHz y varios MHz. Frecuencias más altas ofrecen mayor precisión y resolución, pero menor alcance.
● Rango de detección: es la distancia mínima y máxima a la que el sensor puede detectar objetos.
● Ángulo de cono de detección: es el ángulo de dispersión de la onda ultrasónica. Un ángulo más amplio permite detectar objetos en un área mayor, pero puede disminuir la precisión.
● Resolución: es la mínima diferencia de distancia que el sensor puede detectar.
● Tiempo de respuesta: es el tiempo que tarda el sensor en proporcionar una lectura después de la emisión de la onda.
● Zona muerta (blind zone): es la distancia mínima a la que el sensor no puede detectar objetos debido al tiempo que tarda el transductor en conmutar entre la emisión y la recepción.
● Grado de protección (IP): indica el índice de protección IP del sensor contra el polvo y el agua.
Módulo HC-SR04 (Arduino): Pines Trig y Echo
Para proyectos con microcontroladores, especialmente en electrónica de aficionados, robótica o prototipado, los sensores ultrasónicos de bajo coste como el HC-SR04 son extremadamente populares.

El sensor ultrasónico HC-SR04 es muy usado con Arduino para medir distancias, desde 2 cm hasta 4 metros aproximadamente.
Arduino es una plataforma de hardware y software de código abierto (open-source) que simplifica el desarrollo de proyectos electrónicos. Incluye:
– Placa Arduino: placa con microcontrolador (como el ATmega328 o ESP32), entradas/salidas y alimentación por USB.
– Entorno de desarrollo (IDE): gratuito basado en C/C++, compatible con múltiples sistemas operativos.
Ideal para principiantes y expertos, Arduino permite crear dispositivos interactivos (robots, sensores, IoT) sin necesidad de profundizar en programación avanzada de microcontroladores. Su enfoque accesible y su amplia comunidad lo hacen perfecto para prototipado rápido y educación. En esencia, Arduino democratiza la electrónica, combinando potencia y simplicidad.
Como cualquier sensor de ultrasonidos el sensor HC-SR04 funciona emitiendo ondas ultrasónicas y calculando el tiempo que tardan en rebotar en un objeto. Dispone de 4 pines (aunque algunos modelos pueden tener solo 3, fusionando GND y Trigger):
● VCC: alimentación (5V).
● Trigger (Trig): inicia la medición emitiendo una señal de ultrasonidos. Arduino envía un pulso a este pin “Trigger” cuando recibe una señal. Esto le indica al sensor que debe emitir 8 pulsos ultrasónicos (inaudibles, a 40 kHz).
● Echo: recibe la señal de vuelta (eco) de ultrasonidos. Devuelve a Arduino un pulso cuya duración indica la distancia. Realmente el sensor activa este pin “Echo” y lo mantiene así durante el tiempo que tarda en recibir el eco del ultrasonido.
● GND: tierra (Ground).
La conexión del HC-SR04 con Arduino (ejemplo con Arduino UNO) es:
| Sensor HC-SR04 | Arduino |
|---|---|
| Vcc | 5 V |
| Trig (Trigger) | Pin 9 |
| Echo | Pin 10 |
| GND | GND |
Zona Muerta y Limitaciones (Espuma/Viento)
Para saber si el sensor ultrasónico puede ser adecuado se deben valorar sus limitaciones:
- Sensibilidad a las condiciones ambientales: la temperatura, la humedad y el viento o corrientes de aire, pueden afectar la velocidad del sonido y, por lo tanto, la precisión de la medición.
- Reflexiones múltiples: en entornos complejos, las ondas ultrasónicas pueden rebotar en múltiples superficies, generando ecos falsos y mediciones incorrectas.
- Limitaciones por espuma: materiales blandos o porosos pueden absorber las ondas ultrasónicas, dificultando la detección. El sensor puede fallar o dar lecturas erráticas porque la superficie irregular de la espuma dispersa el sonido, debilitando o anulando el eco de retorno.
- Zona muerta (blind spot): impide medir objetos muy cercanos. En la región más cercana al transductor (típicamente desde 0 hasta unos 30 cm) el sensor no puede medir con precisión. Esto se debe a que el sensor está emitiendo la señal ultrasónica y necesita un breve tiempo para "cambiar" al modo de recepción. Durante ese tiempo, no puede detectar ecos de objetos demasiado cercanos.
- Ángulo de cono: el ángulo de cono puede generar detecciones no deseadas de objetos cercanos que no son el objetivo.
Aplicaciones del Sensor Ultrasónico
Las aplicaciones típicas del sensor de ultrasonidos son las siguientes:
– Medición de distancia y nivel: en tanques, silos, contenedores, etc.
– Detección de obstáculos: en robots, vehículos autónomos, sistemas de asistencia al aparcamiento, etc.
– Automatización industrial: conteo de objetos, control de presencia/ausencia, posicionamiento, etc.
–Sistemas de seguridad: detección de intrusos.
– Industria automotriz: sensores de aparcamiento, control de crucero adaptativo, etc.
– Robótica: navegación autónoma, evitación de obstáculos, etc.
Comparación del Sensor Ultrasónico con Otras Tecnologías
Los sensores ultrasónicos destacan por su versatilidad en detección de distancia, presencia y nivel, pero su elección depende de las necesidades específicas del proyecto. Aquí su comparación con otras tecnologías:
● Ultrasónico vs. Infrarrojos (IR)
– Ventajas del ultrasónico: detecta cualquier material (color, transparencia, sólidos, líquidos). Además, funciona en oscuridad total y es menos afectado por suciedad. Es ideal para entornos variables o líquidos.
– Ventajas del IR: más rápido, económico y pequeño. Ideal para corto alcance y vacío.
● Ultrasónico vs. Láser (LiDAR)
– Ventajas del ultrasónico: coste bajo, área de detección amplia (cono) y funciona mejor con superficies irregulares. Es ideal para aplicaciones generales de bajo coste.
– Ventajas del láser: precisión milimétrica, mayor alcance (hasta cientos de metros) y haz estrecho para objetos pequeños. Es ideal para alta precisión o largas distancias.
● Ultrasónico vs. Capacitivos
– Ventajas del ultrasónico: mayor rango (metros vs. centímetros) y detección en aire libre. Es ideal para distancias medias.
– Ventajas del capacitivo: detecta cualquier material (incluso polvos) a través de barreras no metálicas y es inmune a interferencias acústicas. Es ideal para proximidad extrema o detección a través de paredes.
● Ultrasónico vs. Inductivos
– Ventajas del ultrasónico: detecta metales y no metales, con mayor alcance (metros vs. centímetros). Es ideal para materiales diversos.
– Ventajas del inductivo: exclusivo para metales, robusto en entornos hostiles y alta velocidad de respuesta. Es ideal para detección precisa de metales en industria.
Conclusión, el sensor ultrasónico es ideal para aplicaciones generales con materiales variados y rangos moderados, mientras que otras tecnologías (IR, láser, capacitivos, inductivos) son mejores en escenarios específicos como precisión extrema, vacío, proximidad mínima o entornos industriales. La elección depende del material, rango, coste y condiciones ambientales.
Preguntas Frecuentes sobre el Sensor Ultrasónico
También te puede interesar:
Final de Carrera (Interruptor de Límite): Qué es y Símbolo
Sensor Magnético y Efecto Hall: Tipos (Reed) y Funcionamiento

Sensor Inductivo (Detector de Metales): Conexión NPN/PNP

Sensor Capacitivo: Detección de Líquidos y No Metales

Sensor Fotoeléctrico (Fotocélula Industrial): Tipos y Símbolo

Sensor PIR (Infrarrojo Pasivo): Qué es y Funcionamiento

Boya de Nivel (Flotador Eléctrico o Electronivel): Esquemas

Presostato (Interruptor de Presión): Esquema y Regulación

Termostato de Calefacción: Esquema de Conexión y Tipos
Detector de Humo (Sensor de Incendio): Tipos y Funcionamiento
